Nishanth Adithya Chandramouli
Robotics Researcher.

MS in Robotics Engineering at WPI
Worcester, MA 01609
Hi 👋🏻! I am Nishanth, a Master of Science student in Robotics Engineering at Worcester Polytechnic Institute (WPI) working in the Perception and Autonomous Robotics (PeAR) Lab with Prof. Nitin Sanket and Prof. Connor McCann. My work focuses on co-optimizing the mechanical design and control strategies of a drone shell to improve how a quadcopter orients itself before and after impact. This enables stable, high-speed traversal through dense forests for search-and-rescue missions, allowing drones to safely bounce off obstacles instead of crashing.
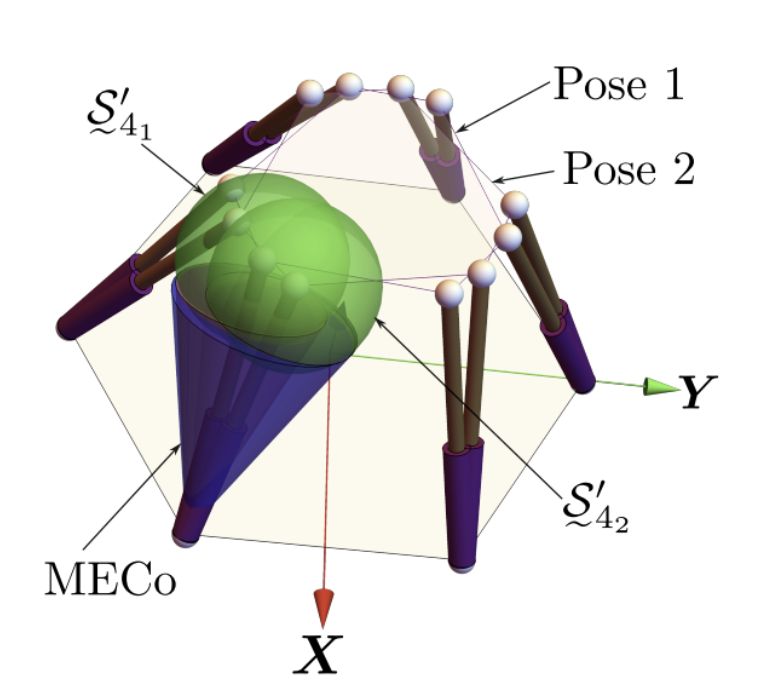
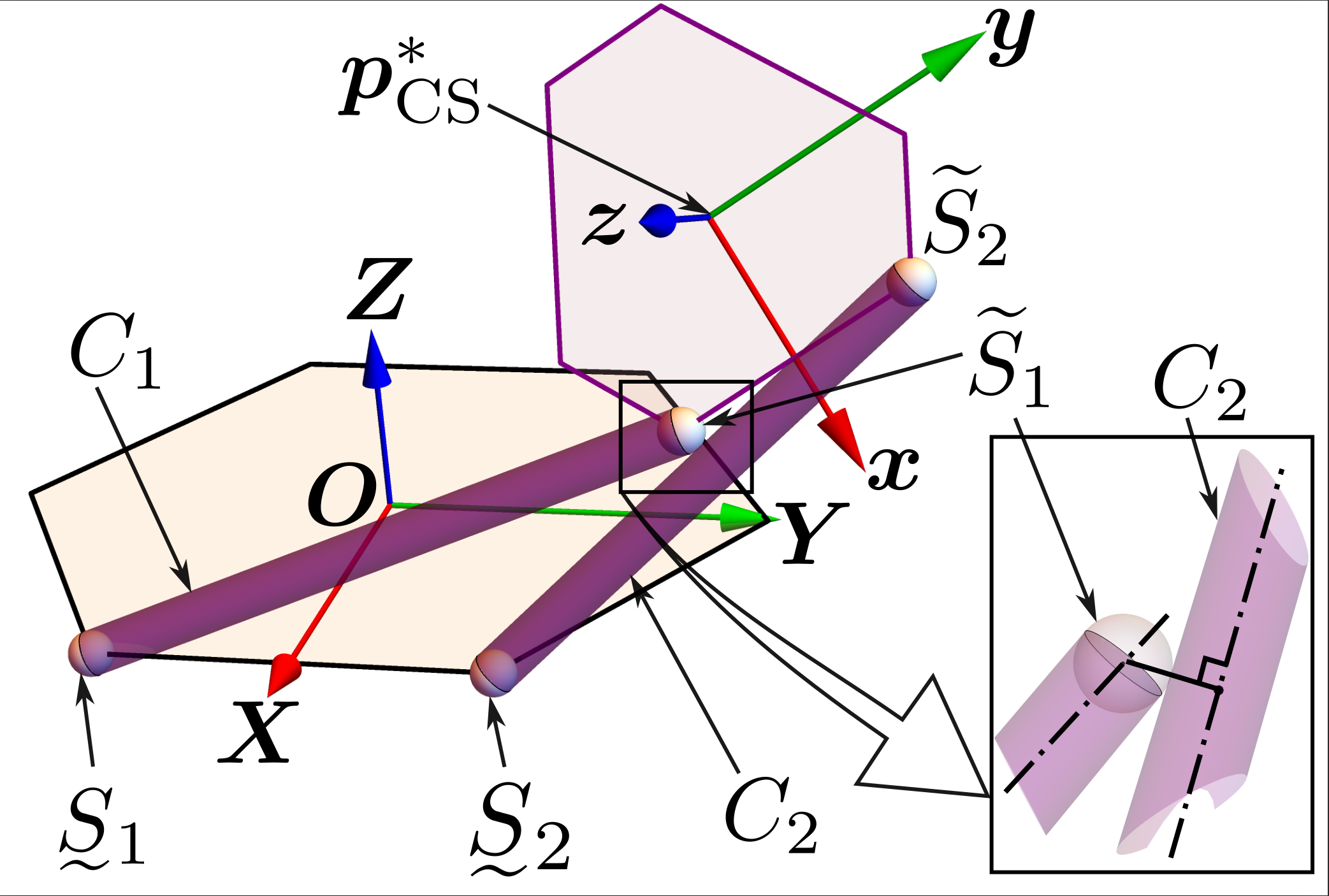
Before joining WPI, I worked in the Manipulators Robotics Group at Robotics Lab, IIT Madras with Prof. Sandipan Bandyopadhyay on the design and analysis of parallel manipulators, including analytical geometric modeling, constraint formulation, real-time collision detection, and path planning for multi-DOF robotic systems. My work and research interests span perception, geometric modeling, vision-based robotic manipulation, and motion planning.