A Semi-Analytical Approach Towards Determining the Largest Collision-Free Sphere in R3 Inside the Effective Regular Workspace of a 6-6 Stewart-Gough Platform Manipulator Corresponding to a Given Orientation Workspace
Nishanth Adithya Chandramouli and Sandipan Bandyopadhyay
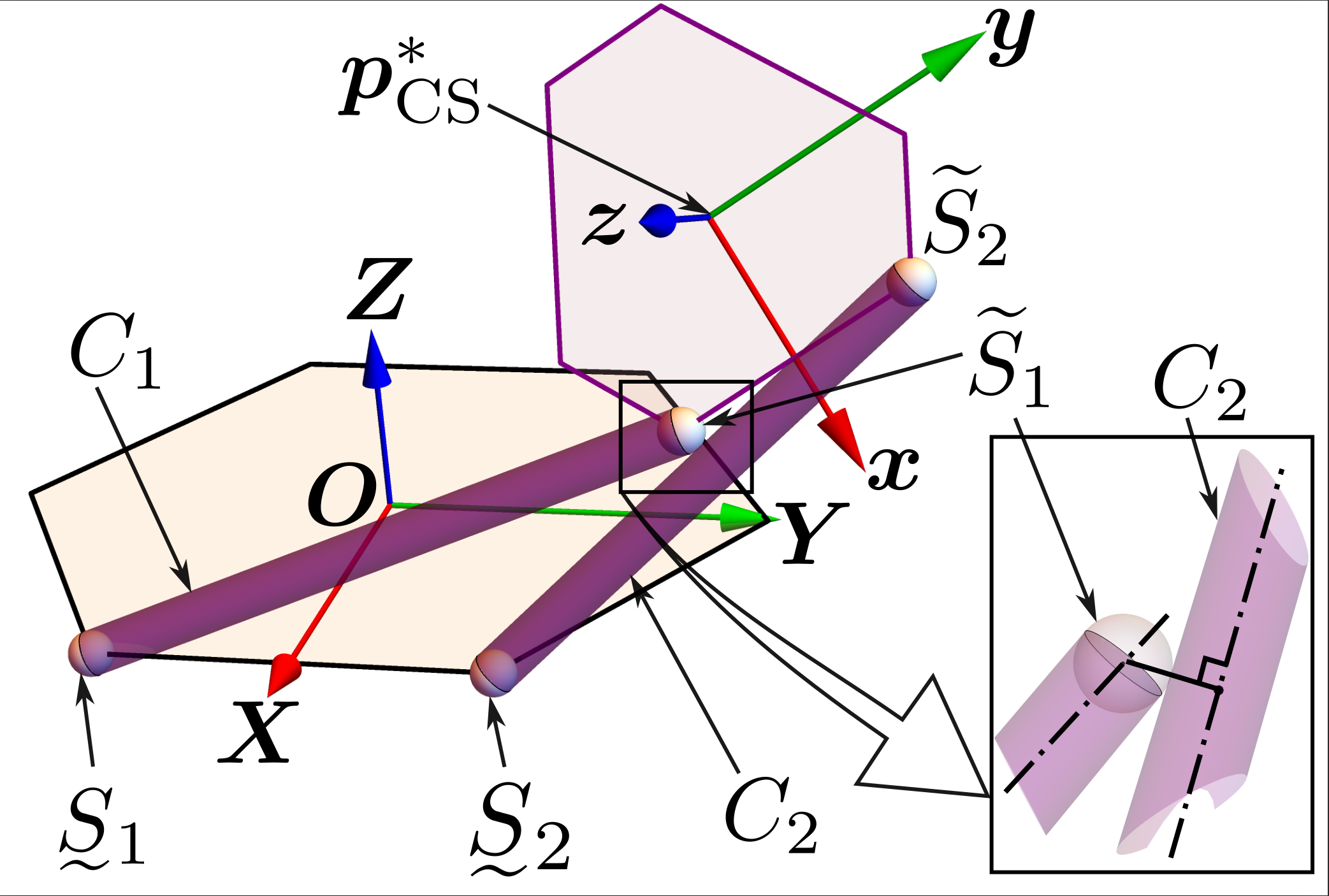
This article focusses on the problem of interference among the links of a parallel robot, namely, the StewartGough platform manipulator. The geometry of the legs is approximated by capsules, leading to the detection of collision among any pair of legs in terms of tangency of the corresponding capsules. Analytical conditions for the said cases of tangency are derived in closed-form, which manifest geometrically as certain quadrics in space. Through a thorough study and explicit characterisation of these surfaces, novel analytical methods are developed to find the largest spheres in space which are tangent to these surfaces. Such spheres are free of possibilities of link collisions, and they can be derived analytically for a given orientation of the moving platform of the manipulator. The analysis is subsequently extended to the orientation workspace of the manipulator by repeating the above-mentioned computations over a large number of discrete samples. The results obtained are verified numerically by comparing them with those generated from other sources. A parametric study is performed to demonstrate the utility of the proposed analysis in practice.
@article{chandramouli2025collision_free_sphere,title={A Semi-Analytical Approach Towards Determining the Largest Collision-Free Sphere in R3 Inside the Effective Regular Workspace of a 6-6 Stewart-Gough Platform Manipulator Corresponding to a Given Orientation Workspace},author={Chandramouli, Nishanth Adithya and Bandyopadhyay, Sandipan},keywords={Stewart-Gough platform manipulator, Capsule, Collision surface, Collision-free sphere, Axisymmetric surface, Extruded surface},year={2026},journal={Mechanism and Machine Theory},doi={https://doi.org/10.1016/j.mechmachtheory.2025.106331},}
Multi-Objective Path Planning for the 6-6 Stewart Platform Manipulator Using the Singularity-Free Tube
Nishanth Adithya Chandramouli and Sandipan Bandyopadhyay
In International Conference on Industrial Problems on Machines and Mechanisms (IPRoMM), 2026
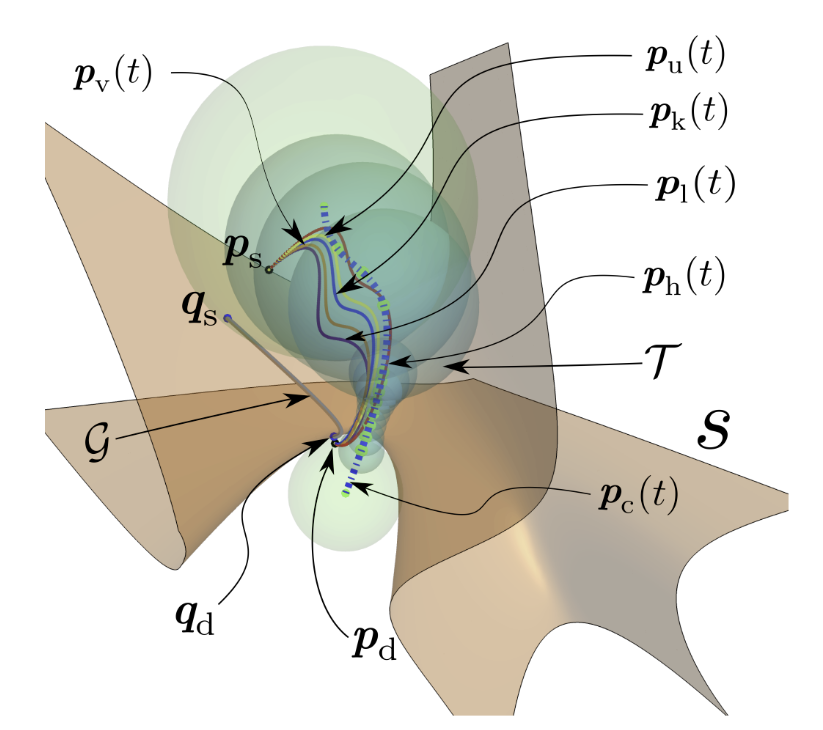
A multi-objective approach for constant-orientation singularity-free path planning for the 6-6 semi-regular Stewart platform manipulator (SRSPM) is presented in this paper. The concept of thesingularity-freetube (SFT), which is described as a one-parametric family of singularity-free spheres, is utilised to ensure that the obtained paths are free of any gain-type singularities. Non-Dominated Sorting Genetic Algorithm(NSGA-II) is used to obtain a set of optimal paths connecting two given points while minimising its length and maximising its distancefromthe boundary ofthe SFT.
@inproceedings{chandramouli2024stewart_path,title={Multi-Objective Path Planning for the 6-6 Stewart Platform Manipulator Using the Singularity-Free Tube},author={Chandramouli, Nishanth Adithya and Bandyopadhyay, Sandipan},booktitle={International Conference on Industrial Problems on Machines and Mechanisms (IPRoMM)},year={2026},doi={https://doi.org/10.1007/978-981-95-1872-2_35},}
2025
A Comprehensive Analysis of the Spherical Joint in A 6-6 Stewart-Gough Platform Manipulator and its Effects on the Joint Limit Compliant Workspace
Nishanth Adithya Chandramouli and Sandipan Bandyopadhyay
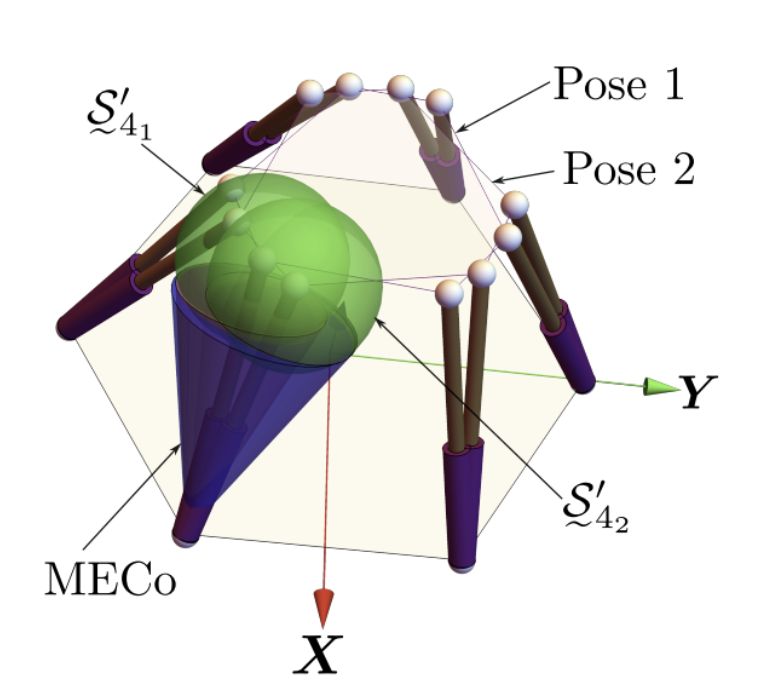
This article presents a comprehensive study of the effect of motions limits of the passive joints on a parallel manipulator on its workspace. The formulation is developed and demonstrated in the context of a fully spatial parallel manipulator, namely, the Stewart-Gough platform manipulator, which incorporates passive joints of spherical nature. The largest spherical subset of the position workspace free of the above-mentioned issue is referred to as the joint limit compliant workspace (JLCW). For a fixed orientation of the moving platform (MP) of the manipulator, the corresponding limiting surface, which turns out to be a right-circular cone, is determined analytically. The analysis is further extended to a specified orientation workspace, albeit in a discrete manner. Subsequently, the JLCW is determined by computing the minimum enclosing cone (MECo) of a set of cones emanating from a given point. The results are verified numerically by comparing them with those obtained using other methods. A parametric study is conducted to demonstrate the practical utility of the proposed analysis.
@article{chandramouli2025spherical_joint,title={A Comprehensive Analysis of the Spherical Joint in A 6-6 Stewart-Gough Platform Manipulator and its Effects on the Joint Limit Compliant Workspace},author={Chandramouli, Nishanth Adithya and Bandyopadhyay, Sandipan},year={2025},journal={SSRN},doi={http://dx.doi.org/10.2139/ssrn.5766082},}
Modelling and prediction of delamination during the end-milling of glass fibre reinforced polymer composites using response surface methodology and least squares support vector machine
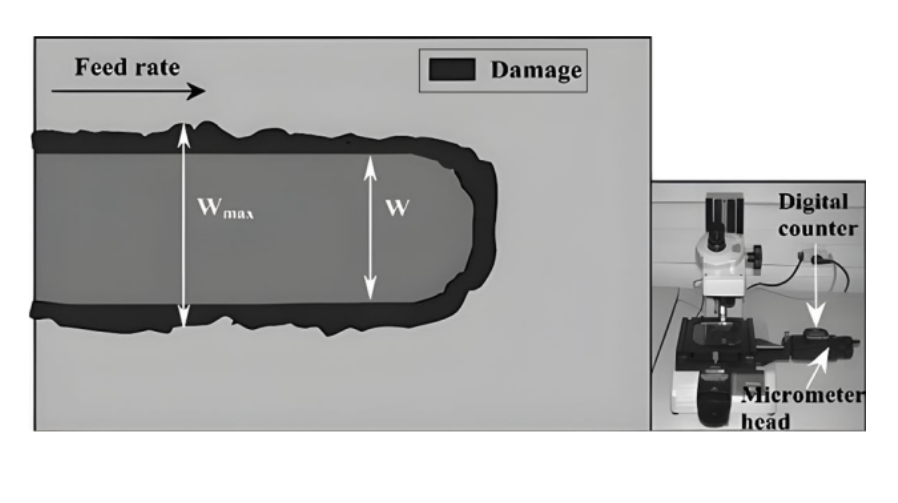
The purpose of this study is to develop a mathematical model for predicting the phenomenon of delamination during end milling of glass fibre reinforced polymer (GFRP) composite laminates. Detailed investigations were carried out using response surface methodology (RSM) to evaluate the effect on delamination and to predict the performance and interactions of the input parameters, namely cutting speed, feed rate and depth of cut. A least square support vector machine (LS-SVM), a supervised machine learning algorithm, was used to build the predictive model with the same set of milling parameters as inputs and the delamination factor as the output response. Different tuning settings and regularization of data were used for analysis and comparison of the model’s performance. In comparison to the regression model developed using RSM, the results of the LS-SVM model show that it is more reliable and accurate in predicting the delamination factor during end milling of GFRP composites.
@article{chandramouli2025delamination,title={Modelling and prediction of delamination during the end-milling of glass fibre reinforced polymer composites using response surface methodology and least squares support vector machine},author={Chandramouli, Nishanth Adithya and Others},journal={Pigment \& Resin Technology},year={2025},doi={10.1108/PRT-10-2024-0108},}
2024
Design and Optical analysis of novel Secondary Reflector for Solar Parabolic Trough Collector system
Nishanth Adithya Chandramouli and Others
In International Conference on Advances in Aerospace and Energy Systems (IAES), 2024
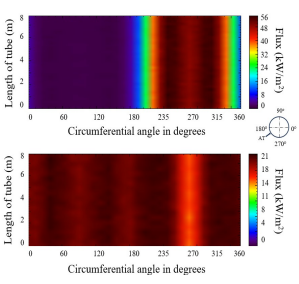
The non-uniformity in flux distribution around the absorber tube of Solar Parabolic Trough Collectors (SPTC) results in material degradation and reduced system performance. To address this issue, the SPTC system is integrated with a secondary reflector system, which homogenizes the concentrated solar radiation around the surface of the absorber. In this work, a novel secondary reflector system for the SPTC is designed, and the range of parameters for optical analysis is determined geometrically. The optical analysis of SPTC with parabolic secondary reflectors is carried out considering the effects of the secondary reflector geometric design variables, such as aperture or width, focal length, and orientation, on the flux-uniformity and power output. The approximate peak flux value of 56 kW/m2 for conventional SPTC was drastically reduced to 22 kW/m2 with the integration of secondary reflectors. Additionally, there was a profound increase of 93.2% in uniformity, with only a 6.5% optical power loss.
@inproceedings{adithya2024solar,title={Design and Optical analysis of novel Secondary Reflector for Solar Parabolic Trough Collector system},author={Chandramouli, Nishanth Adithya and Others},booktitle={International Conference on Advances in Aerospace and Energy Systems (IAES)},year={2024},}