
I am currently pursuing my Master’s degree in Robotics Engineering at Worcester Polytechnic Institute(WPI) where I am engaged in directed research under the guidance of Prof. Nitin Sanket and Prof. Connor McCann in the Perception and Autonomous Robotics ( PeAR) Lab. My research at WPI focuses on developing soft drone shells and corresponding computational control methods in parallel to enhance stability and performance during collisions
Prior to my graduate studies, I worked as a Project Associate in the Robotics Lab at Indian Institute of Technology Madras with Prof. Sandipan Bandyopadhyay. During this time, my research concentrated on the computational design and singularity analysis of parallel manipulators. I received my Bachelors in Mechanical Engineering from SASTRA University in September 2023.


2019 - 2023
2023 - 2025
2025 - Current
Research Interests: My research interests lie at the intersection of mechanics and artificial intelligence. I aim to integrate reinforcement learning with motion planning to achieve general-purpose robotic autonomy.
Publications
|
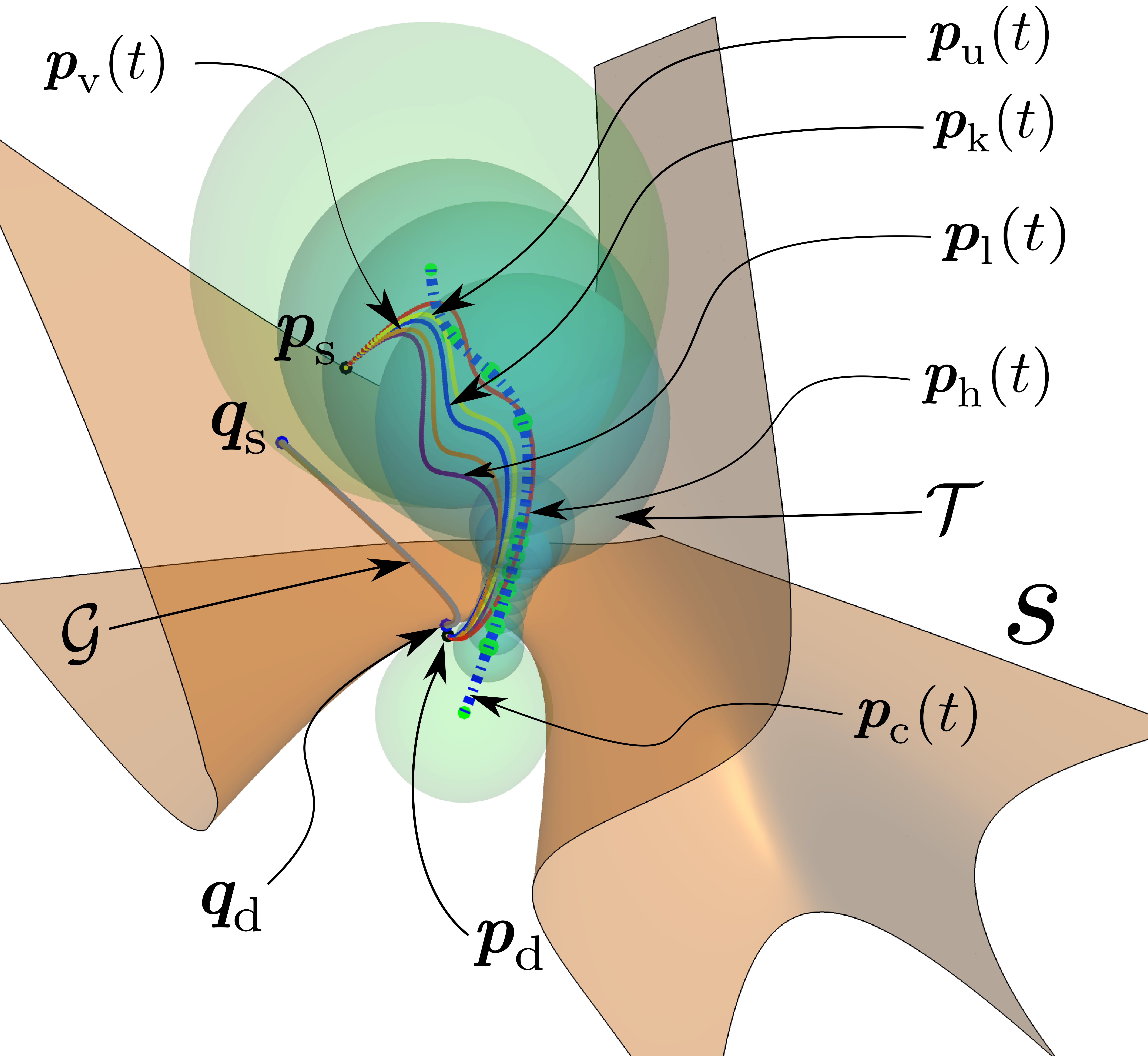
Multi objective path planning for the 6-6 Stewart platform manipulator using the singularity free tubeNishanth Adithya Chandramouli ,A multi objective approach for constant-orientation singularity-free path planning for the 6-6 semi-regular Stewart platform manipulator (SRSPM) is presented in this paper. The concept of the singularity-free tube (SFT), which is described as a one-parametric family of singularity-free spheres, is utilised to ensure that the obtained paths are free of any gain-type singularities. NonDominated Sorting Genetic Algorithm (NSGA-II) is used to obtain a set of optimal paths connecting two given points while minimising its length and maximising its distance from the boundary of the SFT. |
|
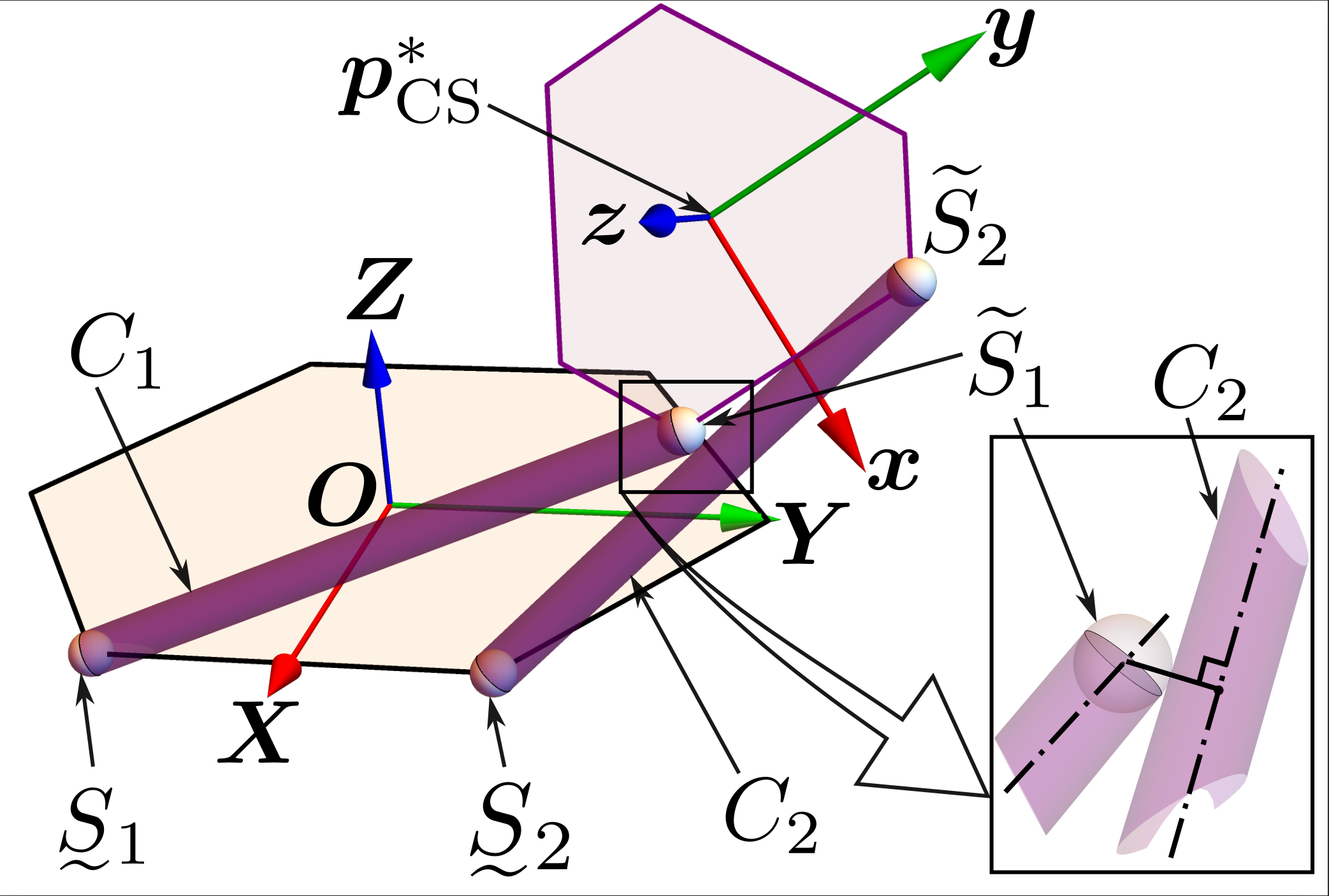
A Semi-Analytical Approach Towards Determining the Largest Collision-Free Sphere in R3 Inside the Effective Regular Workspace of a 6-6 Stewart-Gough Platform Manipulator Corresponding to a Given Orientation WorkspaceNishanth Adithya Chandramouli ,This article focusses on the problem of interference among the links of a parallel robot, namely, the StewartGough platform manipulator. The geometry of the legs is approximated by capsules, leading to the detection of collision among any pair of legs in terms of tangency of the corresponding capsules. Analytical conditions for the said cases of tangency are derived in closed-form, which manifest geometrically as certain quadrics in space. Through a thorough study and explicit characterisation of these surfaces, novel analytical methods are developed to find the largest spheres in space which are tangent to these surfaces. Such spheres are free of possibilities of link collisions, and they can be derived analytically for a given orientation of the moving platform of the manipulator. The analysis is subsequently extended to the orientation workspace of the manipulator by repeating the above-mentioned computations over a large number of discrete samples. The results obtained are verified numerically by comparing them with those generated from other sources. A parametric study is performed to demonstrate the utility of the proposed analysis in practice. |

|
A comprehensive analysis of the spherical joint in a 6-6 Stewart-Gough platform manipulator and its effects on the joint limit compliant workspaceNishanth Adithya Chandramouli ,Paper / Code (Coming Soon) / Video We propose HyP-NeRF, a latent conditioning method for learning generalizable category-level NeRF priors using hypernetworks. We use hypernetworks to estimate both the weights and the multi-resolution hash encodings resulting in significant quality gains. To further improve quality, we incorporate a denoise and finetune strategy that denoises images rendered from NeRFs estimated by the hypernetwork and finetunes it while retaining multiview consistency. |
|
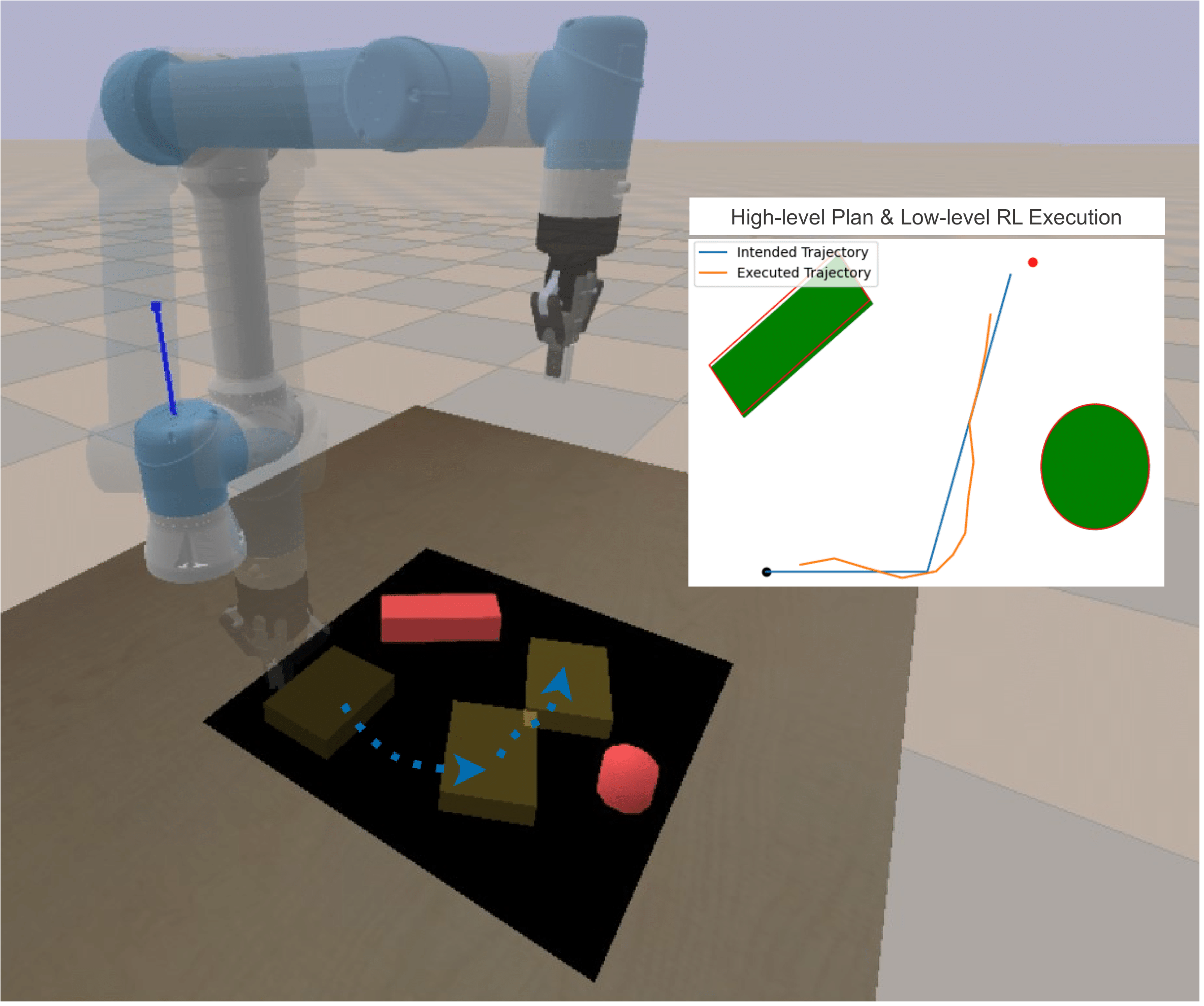
Disentangling Planning and Control for Non-prehensile Tabletop ManipulationAditya Agarwal Paper (Coming Soon)/ Video (Coming Soon) We propose a framework that disentangles planning and control for tabletop manipulation in unknown scenes using a pushing-by-striking method (without tactile feedback) by explicitly modeling the object dynamics. Our method consists of two components: an A* planner for path-planning and a low-level RL controller that models object dynamics. |
News & Announcements
-
[Nov '23] Awarded NeurIPS 2023 Scholar Award (~$1700).
-
[Nov '23] Co-presented 2 papers at PRL, TGR, and LangRob workshops at CoRL2023 in Atlanta, Georgia.
-
[Sep '23] Hyp-NeRF accepted at NeurIPS 2023. See you in New Orleans, Louisiana.
-
[Sep '23] Joined Massachusetts Institute of Technology as a PhD student in EECS.
-
[Apr '23] I'll be joining MIT CSAIL as a PhD student this Fall. I will be a part of the Learning and Intelligent Systems (LIS) Group with professors Leslie Pack Kaelbling and Tomas Lozano-Perez.
-
[Apr '23] Full page abstract on "Uncovering Biases Against Indian Artists" accepted at ICMPC17-APSCOM7 for a spoken presentation. Awarded a Travel Grant of ¥30,000 to attend the conference in Tokyo, Japan.
-
[Mar '23] Awarded a generous travel grant of $2250.00 by ICRA 2023 IEEE RAS Travel Grant Committee to attend the premier robotics conference in London, UK from 29th May to 2nd Jun.
-
[Mar '23] Invited for a talk at Columbia University - slide deck here. The talk was organized as part of my graduate visit days to Brown, Columbia, and MIT.
-
[Jan '23] 5 works on Implicit Video Parameterization, V2V Face-Swapping, MOOCs for Lipreading, 3D Shape Completion, and Synergistic Tabletop Manipulation presented at IIIT Hyderabad's RnD showcase.
-
[Jan '23] 1 paper accepted at ICRA 2023 on 3D Shape Completion in Arbitrary Poses. Featured as the "Publication of the Week" in "Weekly Robotics".
-
[Jan '23] Attending Google Reserach Week in Bangalore from 29th Jan to 31st Jan.
-
[Oct '22] Journal paper on representation space for video-based generative tasks accepted at TMLR 2022.
-
[Aug '22] Two papers on video face swapping and talking-face generation accepted at WACV 2023 round 1 (acceptance rate 21.6%).
-
[May '22] We were in the News (news1, news2) for winning 3rd place at the ICRA 2022 international robotics competition on tabletop rearrangement and planning. Awarded a grant of $1000.00.
[Oct '21] 1 paper accepted at BMVC on lipreading in a one-shot setting using domain adaptation.
-
[Mar '21] I will be joining IIIT Hyderabad as an MS by Research student.
-
[Nov '20] 1 paper accepted at SLT on building multilingual acoustic model for low-resource languages.
-
[Sep '17] Completed my Bachelor's degree from PES University in Computer Science. Received Academic Distinction Award for exceptional academic performance.
-
[Jan '16] I will be interning at the University of Calgary in Summer 2016 fully-funded through the MITACS Globalink Research Award.
[May '23] I'll be starting as a research intern at Mila - Quebec Artificial Intelligence Institute, Montreal with professors Liam Paull and Florian Shkurti. I will work on learning representations for 3D robotic manipulation.
{kind=link}
Academic Services
-
Reviewer for SIGGRAPH 2023, IROS 2023, ICLR 2023 workshops, ICRA 2023.
-
[Aug '22] Coordinator for the 6th CVIT Summer School on AI.
-
[Aug '22] Gave a talk on the challenges in tabletop rearrangement and planning at CVIT Summer School 2022.
-
[Feb '22] I will be taking month long tutorial sessions in machine learning for faculties across universities in India as part of the CSEDU-ML program conducted jointly by IIIT-H, IIT-H, and IIT-D.
-
[Aug '21] Coordinator for the 5th CVIT Summer School on AI and conducted tutorial sessions on self-supervised learning and multimodal learning.
Professional Achievements
-
[Aug '17] Winners at the VMWare Global Relay Opensource Borathon among all participating teams at VMWare.
-
[Mar '20] I was selected as one of the two individuals out of 6,000 employees at Microsoft India to undergo a video shoot for the company's campus hiring program. Available on YouTube.
-
[Mar '18] My work helped scale the Microsoft Community Training platform to its first 100K users. The work was covered by several media outlets ([1], [2], [3], [4]). I was awarded the "Delight your Customer" Award by Microsoft for my outstanding work.
-
[Feb '17] My work on building Microsoft Research India's flagship project Massively Empowered Classroom was deployed by Mauritius Institute of Education. It was inaugurated by MD MSR India and Minister of Tertiary Education, Mauritius and was covered by the press ([1], [2], [3]).
Forked and modified from Viraj Prabhu's adaptation of Pixyll theme